大数据文摘授权转载自机器人大讲堂
机械手作为代替或辅助人手实现灵巧操控的机器人系统,在机器人辅助操控领域有着举足轻重的地位,其功能与性能往往决定了整体系统的服务水平。
现有机械手种类繁多,主要体现在结构特征、换能原理和传动方式不尽相同。然而,由于能量转换原理和运动传递策略的限制,现有机械手多在动作精度、电磁兼容性和结构紧凑性方面存在诸多局限,例如,电磁驱动式机械手电磁兼容性较差,软体式机械手动作精度较差。因此,如何寻找新换能原理的机械手驱动模式,如何设计更高效和更精密的传动机构,甚至完全摒弃传动机构成为研制机械手的新焦点和新挑战。
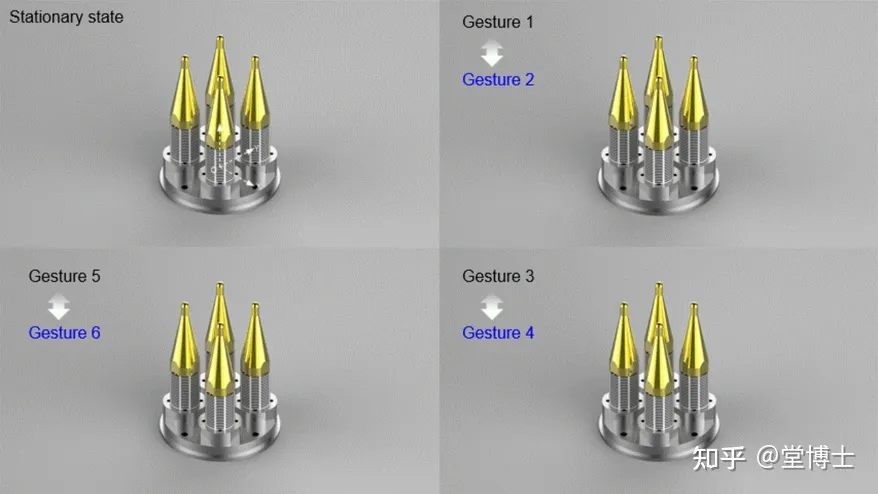
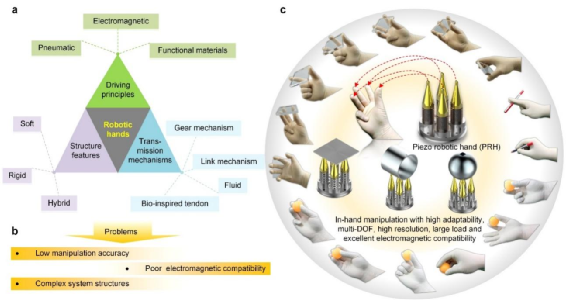
为此,哈工大机器人技术与系统国家重点实验室近期研发了一种四指压电机械手,如图1所示。该机械手的研发受到了人手“在手操控”的启发,主要用于解决传统机械手难以胜任的宏微跨尺度运动操控难题;该机械手不同于传统各类机械手,其核心在于以压电陶瓷的逆压电效应作为电能至机械能的转换原理,从而利用压电陶瓷在电场激励下产生的微观变形运动实现各类物体的宏微跨尺度运动操控。图1 现有各类机械手面临的问题和受“在手操控”启发的压电机械手(PRH)结构配置与运动生成:如图2所示,压电机械手的设计采用了“阵列组构”思想,由四个压电手指和一个手掌通过螺钉固连而成。其中,每个压电手指包含一个由数十片“分区极化”压电陶瓷正交叠加制成的核心驱动元件。在外部电场激励作用下,该驱动元件凭借逆压电效应可实现沿横向x、y轴的二维弯曲变形和沿纵向z轴的一维伸缩变形,即单个手指实现了3个运动自由度。每个压电手指利用底部预紧螺栓将核心驱动元件夹持在指尖与指座之间,凭借集成压电陶瓷的夹心式一体结构可将驱动元件的微观变形转换为整个压电手指的多维微运动,故压电机械手拥有12个运动自由度。功能化操控手势:为利用压电机械手操控各类物体实现运动,研究人员凭借压电机械手独特的四指阵列构型和丰富的运动自由度,在单指多维运动的基础上,提出了“四指协同操控”思想,利用压电手指的多维弯曲和伸缩运动组合,规划了十余种典型的功能化操控手势,如图3所示。通过激励压电机械手的特定操控手势,从而在四个指尖获得特定的运动轨迹,并依托它们实现各类物体的运动操控。此外,研究人员为每种功能化操控手势编制了手势激励编码,据此调整外部激励信号可实现各种功能化操控手势的独立激励和相互切换。运动操控原理:研究人员将压电机械手设计为独特的四指阵列均布构型,核心目的在于将四个指尖同时作为被操控物体的支承端和操控端,开放式的四指布局可满足平板型、球型、圆柱型等物体的支承需求。利用缓慢变化的电场激励压电机械手的某一操控手势,可借助压电机械手与被操控物体之间的静摩擦操控被操控物体实现微步运动,而后利用快速恢复的电场激励相反的操控手势实现快速回位,压电机械手则在快速回位的过程中与被操控物体产生相对滑动,被操控物体由于惯性保持已经产生的微小步距,即实现单步运动,上述操控原理如图4所示。通过连续的动静摩擦交替操控,可利用压电机械手操控各类物体实现微小步距的累积,从而实现宏观的连续运动操控。高适应性运动操控:为检验压电机械手对各类物体的操控适应性和多自由度跨尺度运动操控能力,研究人员选取了十种形状、尺寸和材质各不相同的物体作为操控对象,开展了系列实验研究。利用压电机械手操控平板物体实现了两个直线自由度和一个旋转自由度的运动(2L+1R),操控圆柱物体实现了一个直线自由度和一个旋转自由度的运动(1L+1R),操控球型物体实现了三个旋转自由度的运动(3R),如图5至图7所示,该机械手成功实现了多物体、多自由度、跨尺度的运动操控。集成压电陶瓷的无传动高刚性结构赋予了压电机械手良好的承载能力,研究人员以平板物体为例,通过实验研究了压电机械手的重载操控性能,如图8所示。该机械手成功操控14.76kg的负载实现了三自由度运动,最大操控负载预估值超过50kg,操控负载与自重比值可达49.28倍。应用探索:压电机械手对不同形状、尺寸和材质物体的高适应性运动操控能力为其带来了广阔的应用潜力,研究人员一方面利用压电机械手作为构建多自由度操控设备的基础,在实验中操控平板物体构建了平面三自由度微纳定位平台,借助显微镜系统实现了大规模集成电路、生物组织切片、二维光栅的微观缺陷检测;操控圆柱物体构建了成像设备调焦平台,携带显微镜实现了图像清晰度调节;操控球型物体构建了三维视觉扫描平台,成功携带运动相机实现了三维大视场的运动扫描,有效地扩展了相机视野,相关实验结果如图9所示。图9 压电机械手用于构造多自由度操控设备实现多维微检测、图像对焦和多维视觉扫描另一方面,研究人员对压电机械手进行了机电接口封装,并为其研制了一套专用的可编程驱动电源和一套功能手势控制器,开发了上位机操控软件,实现了压电机械手的系统集成。随后,将封装之后的压电机械手作为6自由度机械臂的执行末端,成功实现了物体在机械臂末端的伴随运动操控,有效扩展了机械臂的操控自由度,并成功实现了物体在原位的运动操控,如图10所示。此外,利用杠杆放大效应进一步放大压电机械手的指尖位移,开展了压电机械手对微小物体的抓取和转运实验,成功实现了1.2mm尺度规则微球和非规则微砂砾的抓取和转运操控,如图11所示。上述应用实验充分展示了压电机械手在宏微尺度下的运动操控能力。图10 压电机械手集成系统独立使用或作为机械臂末端实现伴随操控和原位操控图11 压电机械手作为机械臂末端实现微球和微砂砾的抓取操控综上所述,该项研究工作提出了首个利用功能压电陶瓷构造的四指机械手。
该机械手采用四指阵列均布构型,其压电手指利用四分区环形压电陶瓷集成一体化结构,凭借压电陶瓷的逆压电效应实现了电能至机械能的转换,从而将压电陶瓷的多维微观变形转换为压电手指的多维运动;进一步利用四指协同操控思想规划了十余种典型的功能化操控手势,并借助四指开放布局和动静摩擦交替操控方法实现了平板型、圆柱型、球型等物体的多自由度跨尺度运动操控,成功实现了功能陶瓷微观多维变形到各类物体宏观多自由度运动之间的扩展。详细研究了压电机械手本身的迟滞(<3.95%)、分辨力(15nm)、响应时间(0.5ms)、固有频率(4.1kHz)等基本特性,以及压电机械手操控平板物体所能实现的运动特性;通过开展一系列不同形状、尺寸和材质物体的运动操控实验,成功检验了压电机械手对各类物体的操控适应性和多自由度跨尺度运动操控能力。最后,面向生物医学、半导体制造、微装配等诸多先进技术领域提出的多自由度跨尺度运动操控需求,开展了一系列应用探索实验,成功证实了压电机械手操控不同物体在构建多自由度操控设备和集成机械臂末端执行器方面的广阔应用潜力。总结而言,这项工作以压电陶瓷的逆压电效应作为机械手新的换能原理和驱动模式,以无传动高刚性的功能陶瓷集成一体化构型为核心,展示了利用压电陶瓷微观变形实现物体宏微跨尺度运动操控的可行性;相关的机械手多自由度运动生成方法和功能手势协同操控思想为研制机械手提供了一种新的设计和研制思路,压电机械手独特的宏微跨尺度运动操控能力未来有望解决诸多先进技术领域面临的跨尺度运动操控难题。相关成果以“Piezo robotic hand for motion manipulation from micro to macro”为题发表在Nature Communications上,博士生张仕静、刘英想教授、邓杰副教授为该论文的共同第一作者,刘英想教授为该论文的通讯作者,哈尔滨工业大学为唯一作者单位。2022年8月,该项研究工作相关项目“多自由度跨尺度操控压电机械手”参加“申昊杯”第四届中国研究生机器人创新设计大赛,获得赛事最高奖项特等奖。文章信息:Shijing Zhang#, Yingxiang Liu#*, Jie Deng#, Xiang Gao, Jing Li, Weiyi Wang, Mingxin Xun, Xuefeng Ma, Qingbing Chang, Junkao Liu, Weishan Chen, Jie Zhao, Piezo robotic hand for motion manipulation from micro to macro, Nature Communications, 2023, 14: 500https://www.nature.com/articles/s41467-023-36243-3
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/










 大数据文摘
大数据文摘
 关注网络尖刀微信公众号
关注网络尖刀微信公众号




