
以色列机器人解锁“管道工”身份,可自主变换形状应对管道环境!

大数据为文摘转载自机器人大讲堂
大家熟知的以色列本· 古里安大学开发的RSTAR机器人,最近又解锁了新身份——管道工。
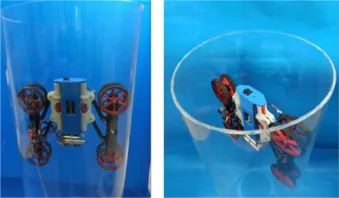
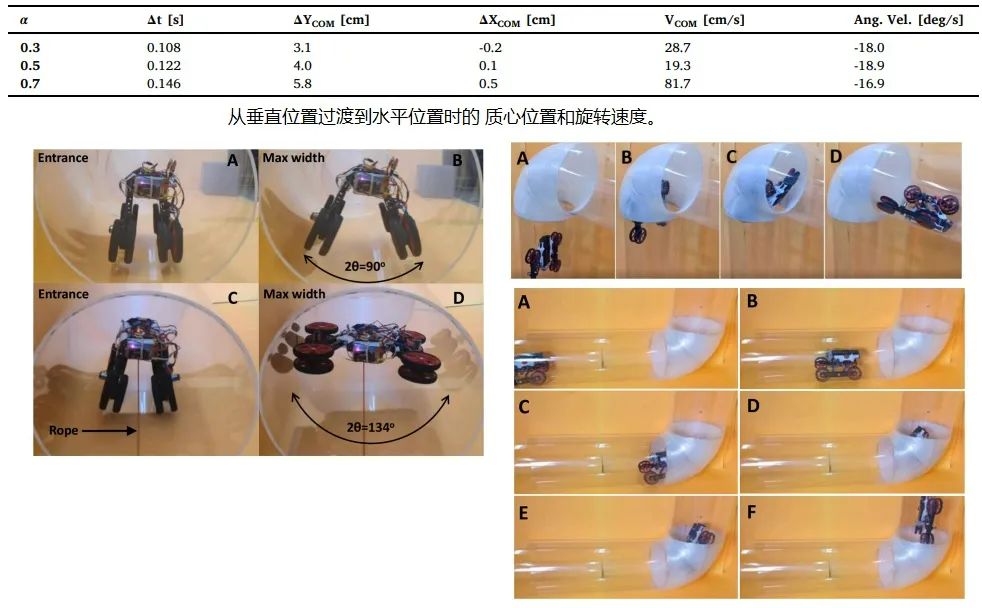
不仅能爬四四方方的烟囱,圆形的管道也能灵活通过:


遇到弯道:

我们之前报道过这款可变形爬行机器人,它能在各种地形上穿梭,灵活程度称得上是机器人界的小强!


RSTAR这次又晋级征服了复杂狭窄的管道环境,将在化工行业或公共下水道的检查、以及搜索和救援任务中发挥重要作用。
让轮式机器人爬管道,难在哪里?
对于RSTAR来说,爬墙并不难。

它具有四杆延伸机构,能够增加其身体和腿部之间的距离(质心位置),从而增加与墙壁之间的摩擦力,帮助其向上爬行。

墙壁之间的距离是固定的,确定好合适的质心位置,保持向上爬就够了。
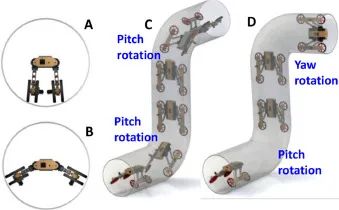
但是,弯弯绕绕的管道环境就复杂多了,总体来说,机器人需要经历三个阶段:
1.从水平爬行过渡到垂直爬升
2.垂直爬升
3.从垂直升过弯道返回到水平爬行。
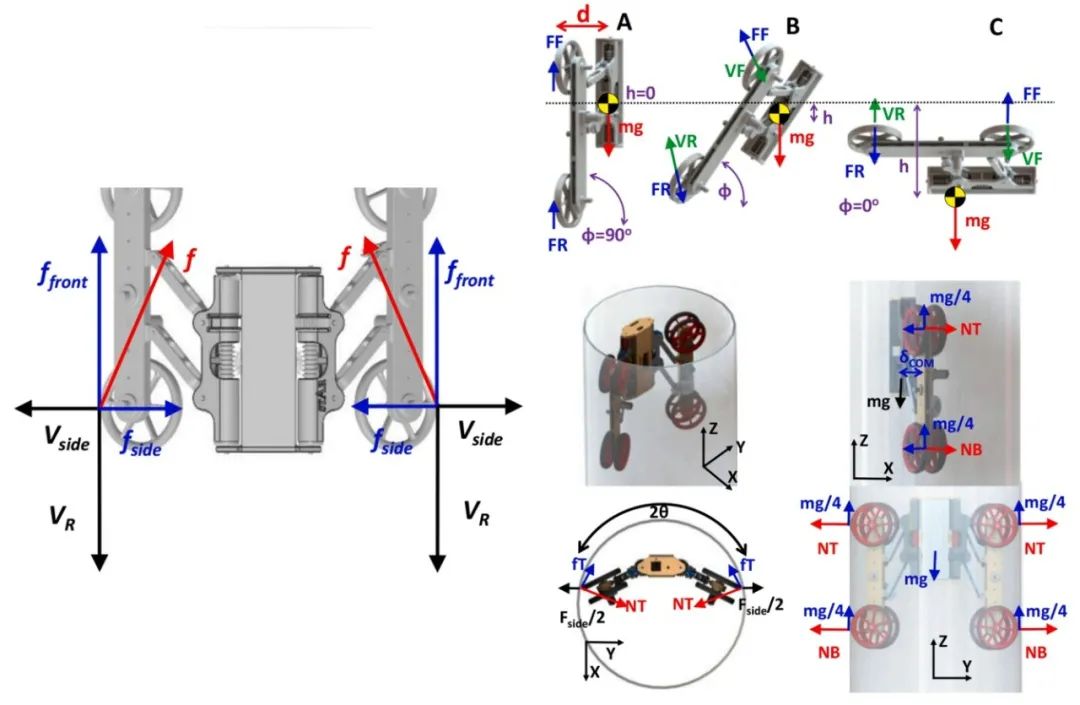
听起来简单,但机器人必须满足多项要求才能成功:首先它必须能够在管道上产生较大的侧向力、驱动轮必须产生足够的推力以克服自身重量;其次,机器人要主动改变在管道中的宽度以通过弯道。
那么研究人员如何实现机器人管道中的爬升与过渡呢?
其实,最重要的是控制机器人四杆延伸机构的角度(即质心位置)来产生合适的侧向力与推力,研究人员首先将机器人的运动学模型描述为其四杆伸展机构的函数。
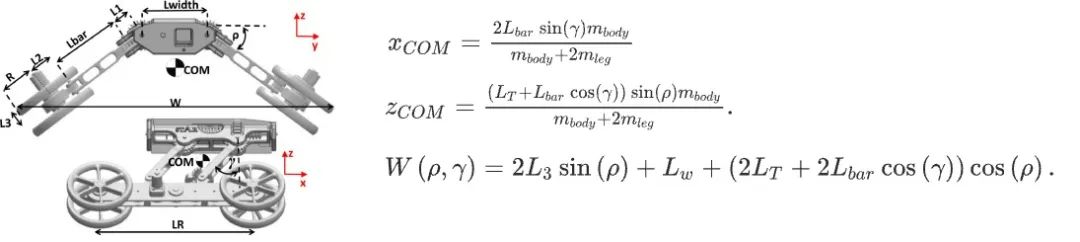
再根据机器人的几何形状、配置、质心位置、管道直径和摩擦系数进行力分析,通过计算所需的侧向力和摩擦力作为机器人相对于管道的宽度及其质心位置的函数来确定运动条件。
理论上说,机器人的质心位置越高,抓地力会增加,但同时会降低其重新配置其形状的能力,因此,研究人员制定了水平爬行、垂直爬升和两种模式之间转换的策略。
四杆延伸机构的角度是使用连接到它们的电位计测量的,该机器人由 Teensy 3.5 控制器控制,可使用数字控制器进行自动排序或远程控制:在自动排序模式下,控制器可以根据预先计划的顺序改变伸展角度或驱动车轮向前,还可以并联驱动不同的电机。
未来将进一步增加自主性
这篇文章发表在ScienceDirect,文章标题为《Analysis of climbing in circular and rectangular pipes with a reconfigurable sprawling robot》。
解锁“管道穿梭”的新技能,意味着RSTAR机器人又克服了更多障碍。
未来,研究人员计划将深度学习算法应用到机器人控制中,进一步增加RSTAR 的自主性,并使用动态机制让机器人以更高的速度并利用其惯性来执行攀爬和过渡。


关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/






 大数据文摘
大数据文摘
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩






- 1 习近平将发表二〇二六年新年贺词 7904141
- 2 2026年国补政策来了 7808738
- 3 东部战区:开火!开火!全部命中! 7712893
- 4 2026年这些民生政策将惠及百姓 7616985
- 5 小学食堂米线过期2.5小时被罚5万 7519709
- 6 解放军喊话驱离台军 原声曝光 7428214
- 7 为博流量直播踩烈士陵墓?绝不姑息 7327605
- 8 每月最高800元!多地发放养老消费券 7238391
- 9 数字人民币升级 1月1日起将计付利息 7141831
- 10 2026年1月1日起 一批新规将施行 7040675