
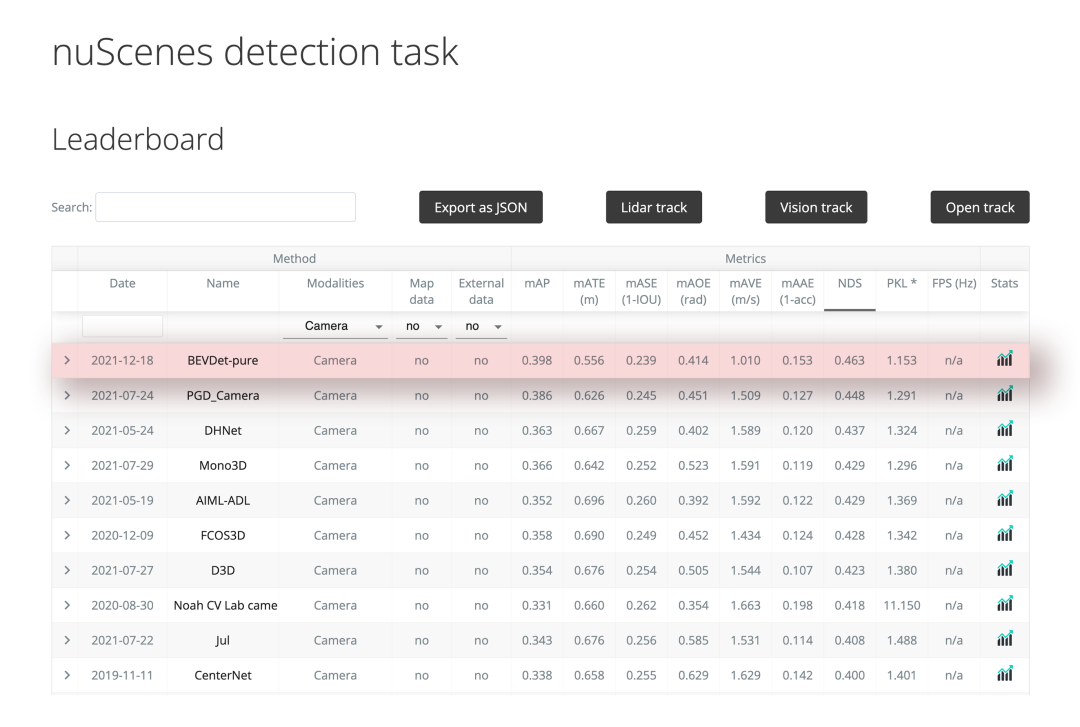
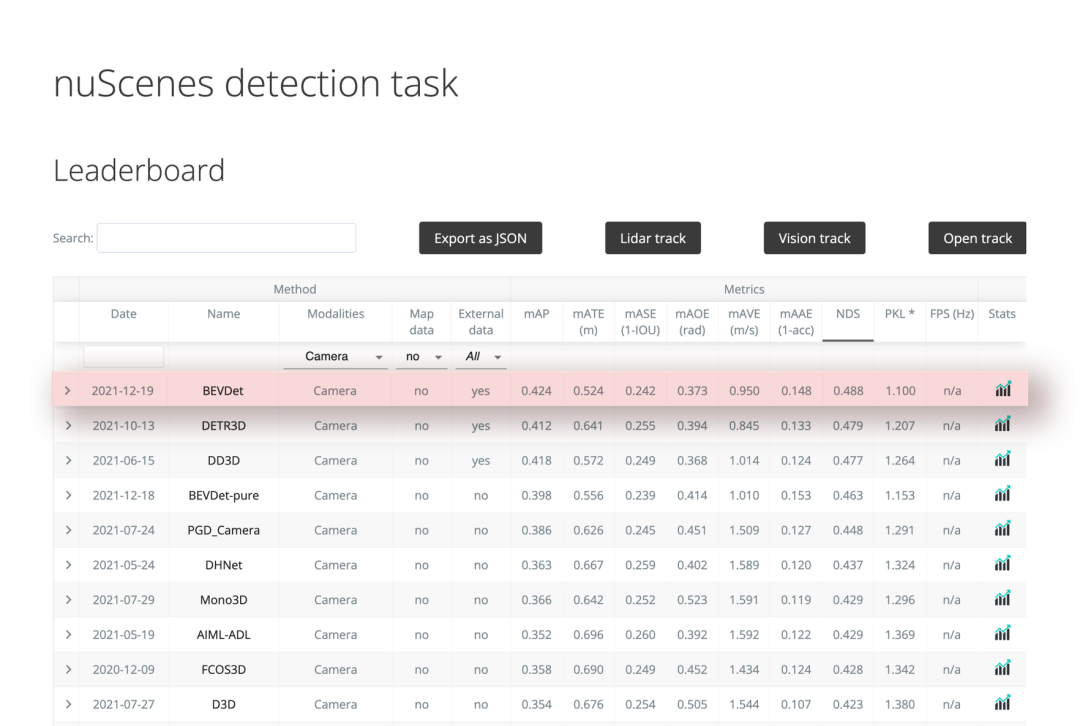
自动驾驶权威评测世界第一,鉴智机器人推出纯视觉3D感知新范式
鉴智机器人的下一代纯视觉自动驾驶 3D 目标检测框架 BEVDet,为解决视觉为主自动驾驶解决方案中视觉雷达、4D 感知、实时局部地图等关键问题提供了更多可能性。

BEVDet技术报告链接:https://arxiv.org/abs/2112.11790
BEVDet 框架具有较强的扩展性,鉴智机器人正基于 BEVDet 进行扩展,实现视觉雷达、4D 感知、实时局部地图等自动驾驶关键模块;
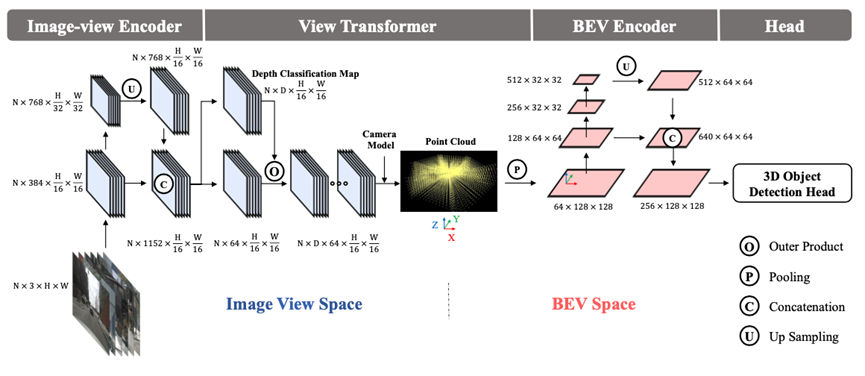
BEVDet 基于相机模型构建 view-transformer ,可有效降低视觉变换模块的学习难度,相比特斯拉所使用的不带先验的 attention-based-view-transformer,此方案可大幅度减少模型对数据量需求,使模型在数据量有限情况下的具备更强的泛化性能;
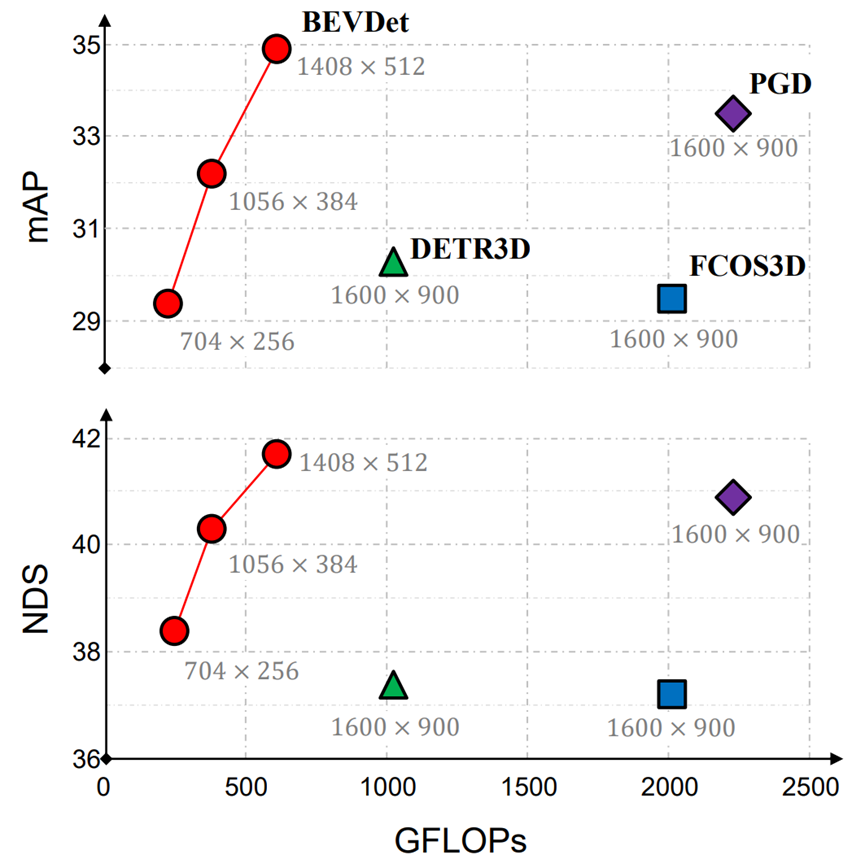
BEVDet 利用更低的算力达到同样或者更好的算法效果,将有助于自动驾驶系统的算力利用效率的提升。

??THE END?
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/






 机器之心
机器之心
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩
赞助链接






排名
热点
搜索指数
- 1 习近平将发表二〇二六年新年贺词 7904141
- 2 2026年国补政策来了 7808738
- 3 东部战区:开火!开火!全部命中! 7712893
- 4 2026年这些民生政策将惠及百姓 7616985
- 5 小学食堂米线过期2.5小时被罚5万 7519709
- 6 解放军喊话驱离台军 原声曝光 7428214
- 7 为博流量直播踩烈士陵墓?绝不姑息 7327605
- 8 每月最高800元!多地发放养老消费券 7238391
- 9 数字人民币升级 1月1日起将计付利息 7141831
- 10 2026年1月1日起 一批新规将施行 7040675