由于线下业务受到打击,美国体育博彩公司DraftKings就把目光投向了无人机竞速。既然是比赛,刮伤擦伤肯定是不可避免了。但是对于无人机来说,要是在比赛过程中旋翼受损,那就基本上等于中途宣布退赛了,要是有什么方法让无人机能够在旋翼受损的情况下保持正常飞行就好了。还真别说,最近,瑞士苏黎世大学和荷兰代尔夫特工业大学就瞄准了这么一个缺口,让你下注的无人机能够在旋翼受损时仍然能够坚持完成比赛。我们还是来看看效果,可以看到,这个无人机有一个旋翼停止运作,机身开始不平衡:
但是,奇迹发生了,尽管如此,这个无人机也并没有坠毁,而是继续沿着既定路线前进。虽然看上去有点曲折,也有点…头晕,但实在是勇气可嘉。根据介绍,在这种情况下,研究团队主要利用到的是机载摄像头提供的信息,进而通过利用其他还能工作的旋翼使机身高速旋转(偏航旋转超过20rad/s),保证正常飞行。目前,该项目已经在GitHub上开源了,有兴趣的大家可以去主页围观一下:https://github.com/uzh-rpg/fault_tolerant_control如何利用两个摄像头,让“摇摇欲坠”的无人机正常工作
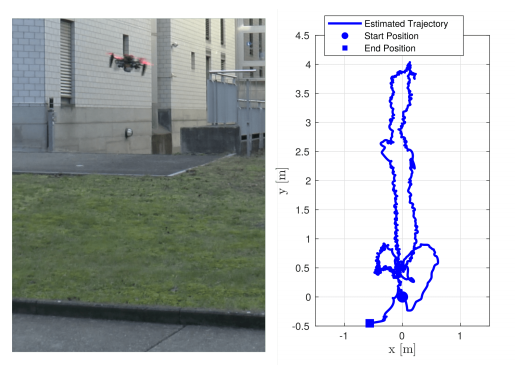
近两年,无人机的发展势头可谓凶猛,尤其是在疫情期间,从体温监测到博彩娱乐,可以说是无所不能了。现在市面上较多的还是多旋翼无人机,这种无人机的旋翼一般来说从4个到8个不等,每个旋翼上都配备了一个电机,保证在飞行时机身能够维持平衡。如果其中一个旋翼受损无法工作,无人机坠毁也确实相当危险了。2015年,根据南京地铁消息,由于航拍无人机坠毁,驾驶员下车捡拾残骸,引起地铁一号线延误两分钟,无人机的主人还因影响运营安全被警方带回处理。不过现在这个担忧被研究人员们解决了,而他们的解决方法,是利用到旋翼上配置的摄像头信息。这个研究成果也以论文的形式发表在了IEEE上。http://rpg.ifi.uzh.ch/docs/RAL21_Sun.pdf为了实现这样的构想,研究人员在无人机上安装了两种摄像机,一个是标准摄像机(standard camera),分辨率为376×240,另一种是事件摄像机(event camera),分辨率为346×240。其中值得注意的是,标准摄像机的最大增益是用来最小化所需的曝光时间,这对减少标准帧中的运动模糊至关重要。之所以要安装两个摄像机,其实是为了让无人机在暗处也能正常工作。如果只使用标准摄像机,会出现运动模糊,在光线较暗时系统无法工作,但如果与事件摄像机结合,即使在黑暗的地方,系统也能正常发挥作用。这两种摄像机的工作机制也并不相同。标准摄像机以每秒数次的恒定速度记录外界图像,事件相机仅在检测到光线变化时才开始工作。这就使得无人机在一个旋翼受损的情况下,能够以高速旋转保证飞行的正常进行,以及乖乖听遥控器的话。在测试中,这个四旋翼无人机的一个旋翼停止了工作,但是根据它仍然能够向前飞行4米后返回原点,和指定轨迹一模一样。这也说明了该算法的合理性和可操作性。图为飞行四旋翼的快照,以及状态估计器的飞行轨迹俯视图。在这次飞行任务中,环境照度为2000勒克斯。
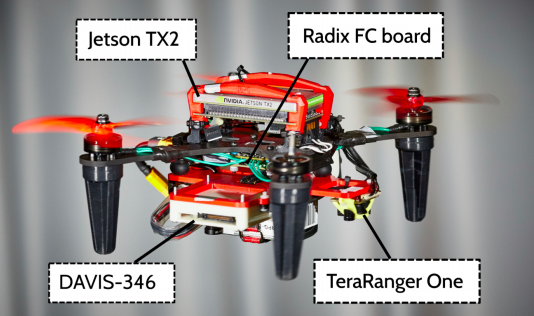
实验中研究人员所使用的四旋翼无人机是利用碳纤维框架以及3D打印部件制成的。它由4台2306-2400KV电机和5英寸螺旋桨驱动,状态估计和控制算法在Nvidia Jetson TX2上运行,包含一个四核2.0 Hz CPU和一个双核2.5 Hz CPU。控制算法中的电机推力指令通过Radix FC飞控板发送到电机,飞控板运行一个自建的固件,也以200 Hz的频率将IMU测量值发送到TX2。同时,研究者使用了TeraRanger One,一个LED时空距离传感器,来测量与地面的距离。在评估方面,研究人员主要使用飞行数据来评估所提出的互补滤波器的性能,与没有考虑旋转运动的滤波器进行对比。根据上图显示,当四旋翼在5秒左右开始旋转时,标准互补滤波器的滚转误差变得很大。相比之下,经过旋转校正的互补滤波器可以很好地估计俯仰角和滚转角,尽管旋转速率超过20rad/s。上图的底图也解释了滚动估计的巨大误差。作为标准互补滤波器假设加速度计测量负重力矢量,红线和蓝线应该是重合的。然而,当出现相当大的向心加速度时,这种假设就失效了,这将导致加速度计测量的显著偏置。相信,随着无人机的逐渐普及,这个算法的应用性也将逐渐扩展。不过对于这样的特殊情况,这也不会是唯一解,如果你还有什么好办法,欢迎在留言区讨论~关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/
















 大数据文摘
大数据文摘
 关注网络尖刀微信公众号
关注网络尖刀微信公众号




