今年 5 月底,Facebook AI 提出了 DETR,利用 Transformer 去做目标检测,该方法去除了许多目标检测中的人工设计组件,同时展现了非常好的性能。但是,DETR 存在收敛速度慢和特征分辨率有限等缺陷。为了解决这些问题,来自商汤研究院等机构的研究者提出了可变形 DETR,其注意力模块仅关注于参考点附近的一小部分采样点作为注意力模块中的 key 元素。可变形 DETR 可以在比 DETR 少 9/10 的训练轮数下,达到更好的性能(尤其是在小物体上)。在 COCO 基准上的大量实验表明了该方法的有效性。
论文链接:https://arxiv.org/abs/2010.04159DETR 收敛慢、计算复杂度高的固有缺陷催生了可变形 DETR当今的目标检测器大多使用了人工设计的组件,如锚框生成、基于规则的训练目标分配、非极大值抑制后处理等。所以它们不是完全端到端的。Facebook AI 提出的 DETR【1】无需这些手工设计组件,构建了第一个完全端到端的目标检测器,实现了极具竞争力的性能。DETR 采用了一个简单的结构,即结合了卷积神经网络和 Transformer 【2】的编码器-解码器结构。研究人员利用了 Transformer 既通用又强大的关系建模能力来替代人工设计的规则,并且设计了恰当的训练信号。虽然DETR的设计非常有趣,而且性能也很好,但它自身也存在着如下两个问题:与现有的目标检测器相比,它需要更长的训练轮数才能收敛。比如,在 COCO 基准【3】上,DETR 需要 500 个 epoch 才能收敛,这比 Faster R-CNN【4】慢了 10 到20倍;
DETR 在检测小物体上表现出了较差的性能。当今的目标检测器通常利用了多尺度的特征,从而小物体可以从高分辨率的特征图中检测。但是对于 DETR 来说,高分辨率的特征图将带来不可接受的计算复杂度和内存复杂度。
以上提到的问题可以主要是由于 Transformer 中的组件在处理图像特征图时的天生缺陷。在初始化时,注意力模块(如公式(1)所示)的注意力权重近似均匀地分布在特征图的所有像素上,所以需要非常长的训练轮数来学习将注意力权重集中于稀疏的有意义的位置。另一方面,Transformer 的编码器中注意力权重计算的复杂度与像素个数的平方成正比。因而它需要非常高的计算和内存复杂度来处理高分辨率的特征图。
在图像领域,可变形卷积【5】是一个非常强大而且高效的机制,它将注意力集中于稀疏的空间位置。虽然天生避免了上面提到的这些问题。但它缺乏关系建模机制这一元素,而这是 DETR 成功的一大关键。所以,在本文中,来自商汤研究院和中科大的研究者提出了可变形 DETR,解决了 DETR 收敛慢、计算复杂度高这两大问题。可变形 DETR 方法和模型解读
具体而言,可变形 DETR 结合了可变形卷积中的稀疏空间采样的优势和 Transformer 中的关系建模能力。研究者提出了可变形注意力模块(如公式(2)所示),它关注于一小部分采样的位置,作为从特征图所有像素中预先筛选出显著的 key 元素。
这一模块天生可以被扩展到聚合多尺度特征上(如公式(3)所示),而不需要 FPN【6】的帮助。
可变形 DETR 目标检测器用(多尺度)可变形注意力模块替换 Transformer 注意力模块来处理特征图,如下图 1 所示。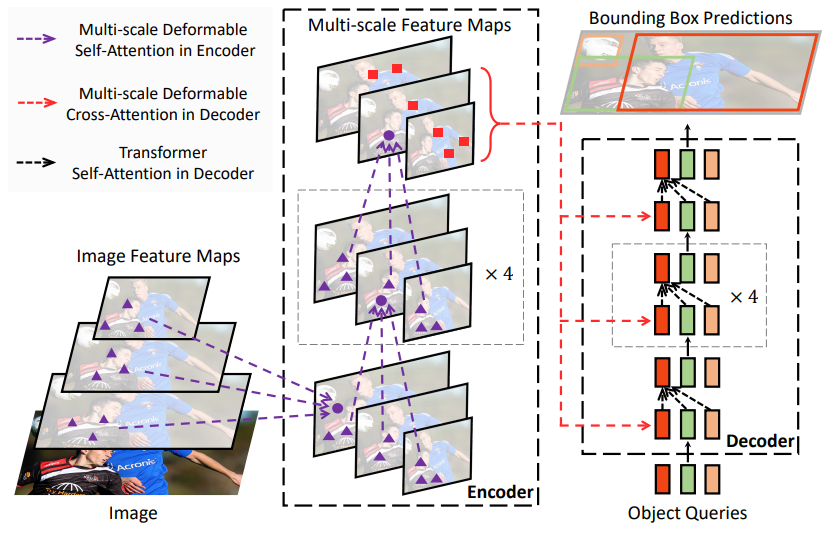
由于可变形 DETR 的快速收敛性和计算、内存高效性,它打开了探索端到端目标检测器的变种的可能性。此外,研究者探索了一个简单而有效的迭代式物体边界框细化机制来进一步提高检测性能。他们也尝试了两阶段可变形 DETR,其中第一阶段的 region proposals 也是由可变形 DETR 的一个变种生成,然后被进一步输入到解码器进行迭代式物体边界框细化。研究者在 COCO 基准【3】上的大量实验展示了这一方法的有效性。与 DETR 相比,可变形 DETR10 训练轮数降至 1/10(见下图 2),但达到了更好的性能(尤其是在小物体上,见下表 1)。本论文中提出的两阶段可变形 DETR 变种可以进一步提升性能,可变形 DETR 的代码也将开源。可变形 DETR 与 DETR 在 COCO 2017 val set 上的性能对比如下表 1 所示。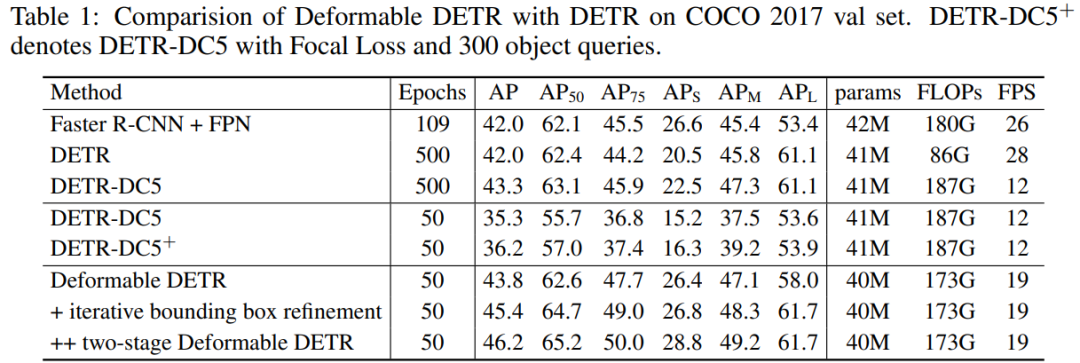
表 1:可变形 DETR 与 DETR 在 COCO 2017 val set 上的比较。可变形 DETR 和 DETR 的收敛曲线对比如下图 2 所示。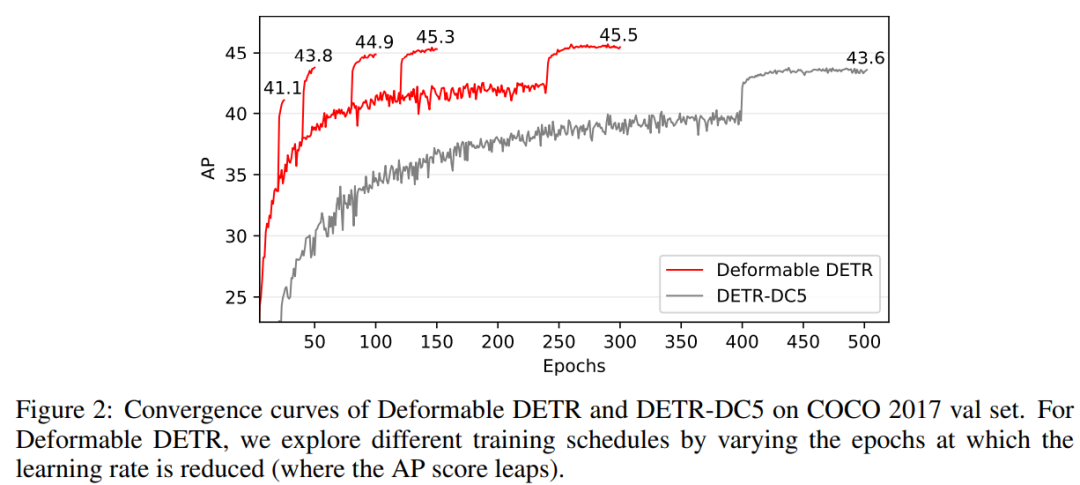
图 2:可变形 DETR 与 DETR 的收敛曲线对比。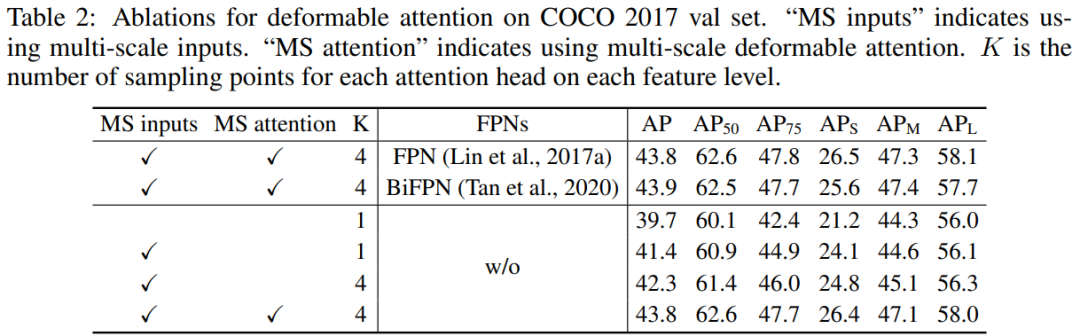
可变形 DETR 与当前最为先进的目标检测器在 COCO 2017 test-dev 上的性能对比如下表 3 所示。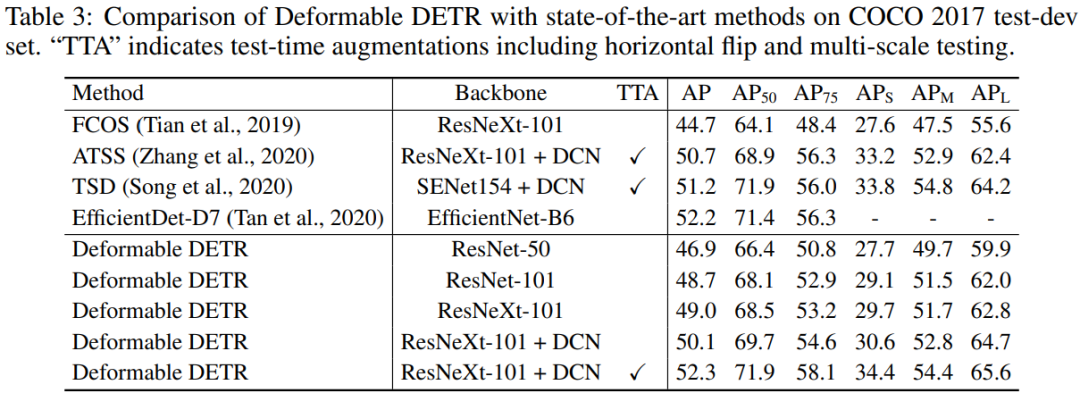
表 3:可变形 DETR 与当前最先进的方法在 COCO 2017 test-dev 上的比较。【1】Nicolas Carion, Francisco Massa, Gabriel Synnaeve, Nicolas Usunier, Alexander Kirillov, and Sergey Zagoruyko. End-to-end object detection with transformers. In ECCV, 2020.【2】Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, ?ukasz Kaiser, and Illia Polosukhin. Attention is all you need. In NeurIPS, 2017.【3】Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Doll?ar, and C Lawrence Zitnick. Microsoft coco: Common objects in context. In ECCV, 2014.【4】Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster r-cnn: Towards real-time object detection with region proposal networks. In NeurIPS, 2015.【5】Jifeng Dai, Haozhi Qi, Yuwen Xiong, Yi Li, Guodong Zhang, Han Hu, and Yichen Wei. Deformable convolutional networks. In ICCV, 2017.【6】Tsung-Yi Lin, Piotr Doll?ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Feature pyramid networks for object detection. In CVPR, 2017a.10月14日,AWS解决方案架构师贺浏璐将带来一场live coding,演示如何利用AWS云服务构建一个简单的数据管道从爬取、处理到分析视频内容。
识别二维码或点击阅读原文,立即预约直播。

??THE END?
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/







 机器之心
机器之心
 关注网络尖刀微信公众号
关注网络尖刀微信公众号




