
解析|一文读懂AGV的关键技术——激光SLAM与视觉SLAM的区别
来源:新机器视觉
移动机器人(AGV)是工业机器人的一种。它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,在实际生产中最主要的用途是搬运,可以说只要有搬运需求的地方,就有移动机器人的应用可能。

近年来,移动机器人技术在世界范围内得到快速发展。人们致力于把移动机器人应用于各种场景中,从室内外搬运机器人,到服务型机器人,再到工业机器人等,移动机器人的运用都得到了巨大突破。
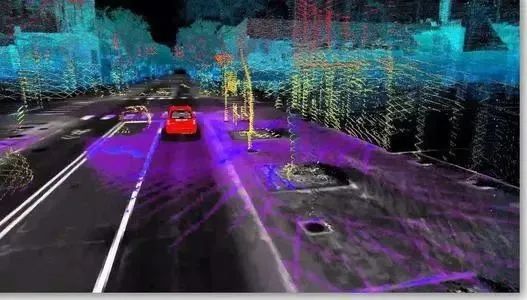
在移动机器人研究中一个最关键的技术就是即时定位和建图,也就是所谓的SLAM技术。SLAM它试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。

SLAM技术正是为了实现这个目标涉及到的诸多技术的总和。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
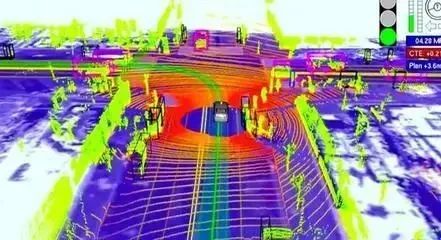
按照核心的功能模块来区分,目前常见的移动机器人SLAM系统一般具有两种形式:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
那么激光SLAM与视觉SLAM到底有何不同呢?看下面这个表格就一目了然啦~
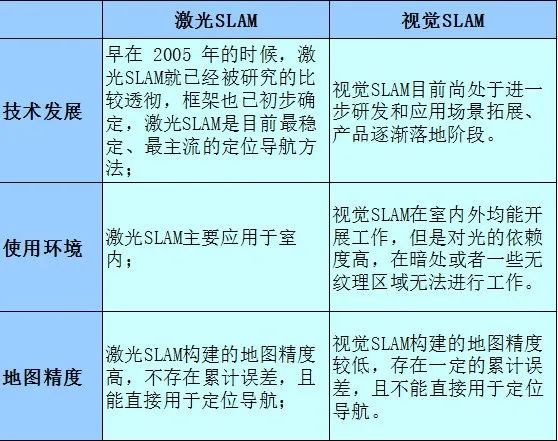
激光SLAM与视觉SLAM比较
通过对比我们发现,激光SLAM和视觉SLAM各擅胜场。两者相较,激光 SLAM 构建的地图精度高,不存在累计误差,且能直接用于定位导航。

当然,激光SLAM也有一定的局限性。比如在又长又直、两侧是墙壁的长廊或是动态变化大的环境中,单纯依靠激光SLAM容易发生定位丢失的情况。
其实,要想让移动机器人应对各种复杂的使用场景,激光SLAM与视觉SLAM必将在相互竞争和融合中发展,多传感器融合导航必然是未来发展方向。伴随移动机器人核心技术的解决,将替代人工完成简单、重复、劳动量大的繁杂工作,真正为人类服务。

未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
??如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”


关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/






 人工智能学家
人工智能学家
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩






- 1 习近平将发表二〇二六年新年贺词 7904141
- 2 2026年国补政策来了 7808738
- 3 东部战区:开火!开火!全部命中! 7712893
- 4 2026年这些民生政策将惠及百姓 7616985
- 5 小学食堂米线过期2.5小时被罚5万 7519709
- 6 解放军喊话驱离台军 原声曝光 7428214
- 7 为博流量直播踩烈士陵墓?绝不姑息 7327605
- 8 每月最高800元!多地发放养老消费券 7238391
- 9 数字人民币升级 1月1日起将计付利息 7141831
- 10 2026年1月1日起 一批新规将施行 7040675