拧瓶盖螺丝,高度灵活的柔性机器人为你开可口可乐
机器之心报道
编辑:铭怿
不过,用机器人拧瓶盖总觉得有点「大材小用」。
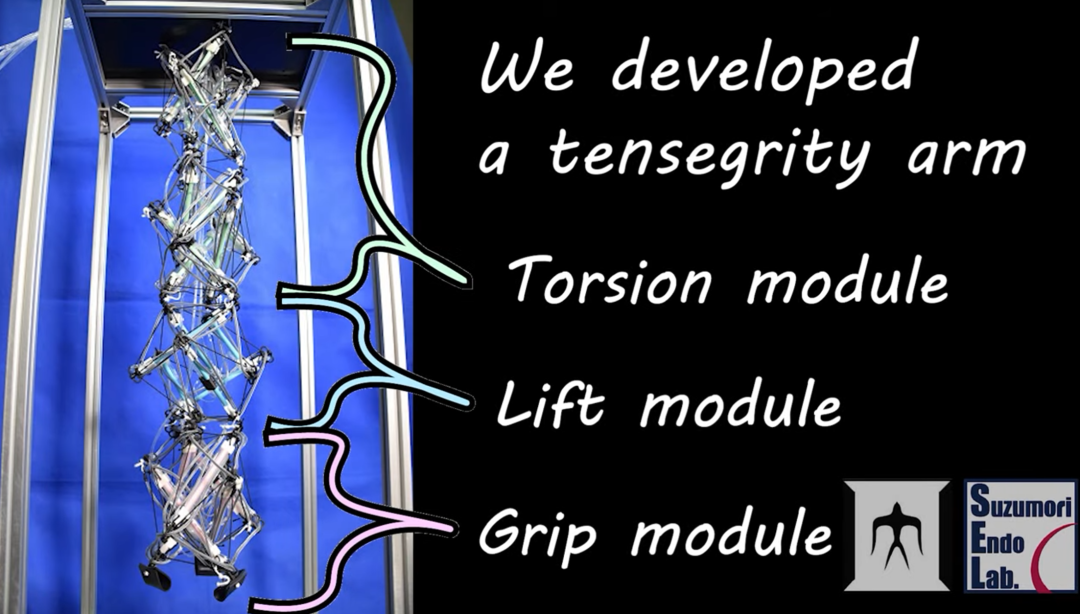
最近一项研究中,东京工业大学的研究人员制造出了这样一种机器人,它具有高度灵活性,同时仍保持其「肌肉」内的高度张力,使其躯体能进行充分的扭转,从而完成困难的任务。研究结果发表在 1 月 13 日的《IEEE 机器人和自动化通讯》。
拧下瓶盖。

上螺丝。


© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
关注公众号:拾黑(shiheibook)了解更多
[广告]赞助链接:
四季很好,只要有你,文娱排行榜:https://www.yaopaiming.com/
让资讯触达的更精准有趣:https://www.0xu.cn/

![卧蚕阿姨 尝试了一下最近很火的tufting 劝退了,手都差点打抽筋[doge] ](https://imgs.knowsafe.com:8087/img/aideep/2022/2/20/ba54e50106978713be326410f3a897ae.jpg?w=250)

![Z_Run宁 乌云乌云快走开[浮云]](https://imgs.knowsafe.com:8087/img/aideep/2022/7/8/73c92f97a4501c9a161cd333afa2c04f.jpg?w=250)


 机器之心
机器之心
 关注网络尖刀微信公众号
关注网络尖刀微信公众号随时掌握互联网精彩
赞助链接







排名
热点
搜索指数
- 1 习近平主持召开企业和专家座谈会 4938178
- 2 向佐怒斥李胜利:离中国香港远一点 4900778
- 3 解放军喊话台舰:不要为“台独”卖命 4840215
- 4 第七届数字中国建设峰会亮点超多 4777520
- 5 小龙虾价格暴跌年轻人不爱吃了? 4611997
- 6 台民众对解放军围岛军演有哪些反应 4557023
- 7 人民日报评老乡鸡葱油鸡加20克 4489496
- 8 日本车企宣布召回超10万辆车 4340519
- 9 湖南职称取消“高门槛”?谣言 4278414
- 10 猫咪做完绝育手术一脸生无可恋 4130226